Share this News
:



 March 26, 2024
March 26, 2024 Dilna Parvin
Dilna Parvin
In the realm of home robotics, the path to success has been fraught with challenges, from pricing to practicality and the ability to navigate unpredictable environments. Despite efforts to address these issues, the lingering question of how to handle inevitable mistakes has remained. However, a new study from MIT offers a promising solution, leveraging large language models (LLMs) to enhance robot performance.
Presenting their findings at the upcoming International Conference on Learning Representations (ICLR) in May, researchers aim to imbue robots with a sense of "common sense" to rectify errors. Unlike industrial counterparts with ample resources for problem-solving, consumer-grade robots often lack the adaptability needed to navigate real-world scenarios. This research seeks to bridge that gap by utilizing LLMs to guide robots through complex tasks and facilitate autonomous error correction.
Traditionally, when robots encounter obstacles, they exhaust predefined options before requiring human intervention, a significant drawback in home environments where variables are constantly changing. The study proposes a novel approach, breaking tasks into smaller subsets and leveraging LLMs to provide natural language guidance. By enabling robots to self-correct minor deviations rather than restarting tasks from scratch, this methodology promises to streamline home robotics applications.
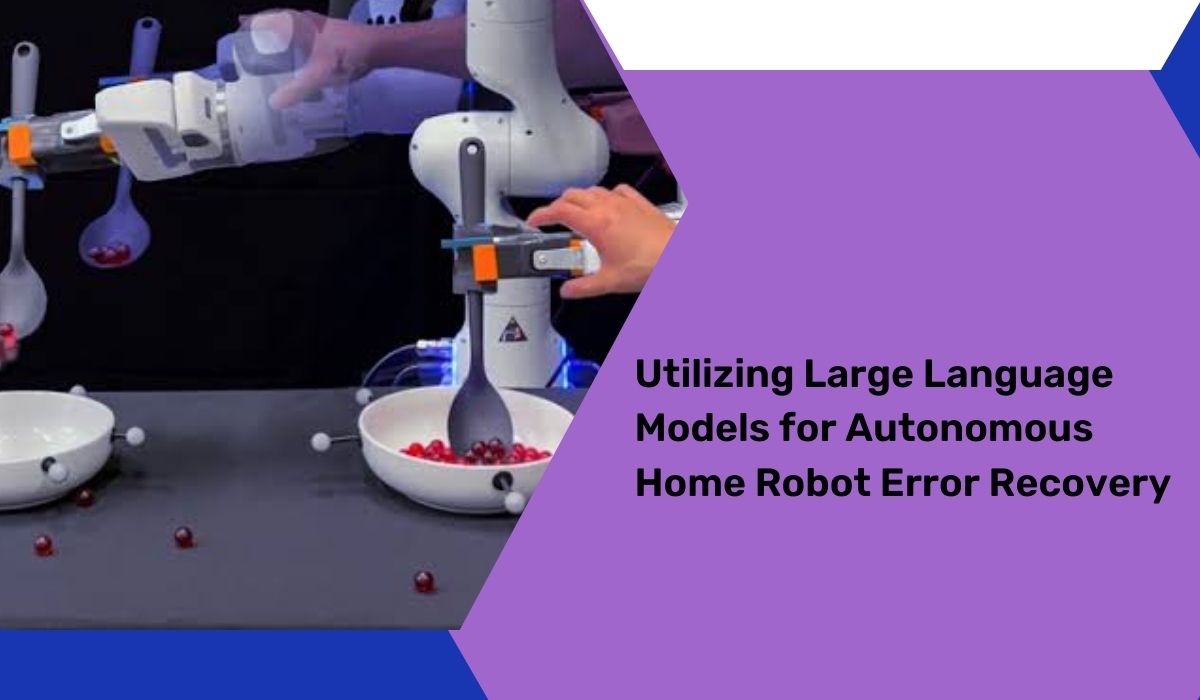
By harnessing the power of LLMs, researchers demonstrate how robots can learn to adapt and recover from errors independently. Through a series of demonstrations involving tasks like scooping marbles, the study showcases the effectiveness of this approach in enhancing robot autonomy. With this breakthrough, the era of home robotics may be poised for significant advancements, offering users a more seamless and intuitive experience.
